hdrpano, Technische Fotografie, Hardware und Software Entwicklung, © Kilian Eisenegger 2026 info@hdrpano.ch, 4800 Zofingen, Switzerland, HTML 5 optimiert

map-creator
map-creator generates 3D DJI missions for photogrammetry and orthophotos. map-creator uses multiple GeoTiff sources for highly accurate elevation or AGL. It reads KML and KMZ missions and saves KMZ missions for DJI Fly and DJI Pilot (Litchi Pilot is also supported). The map-creator runs on MacOS and iOS. On MacOS, a local GeoTiff server from opentopodata.org can be used. I have developed a Windows version with the same algorithms. The Windows version is actually only in script mode.Edit waypoints
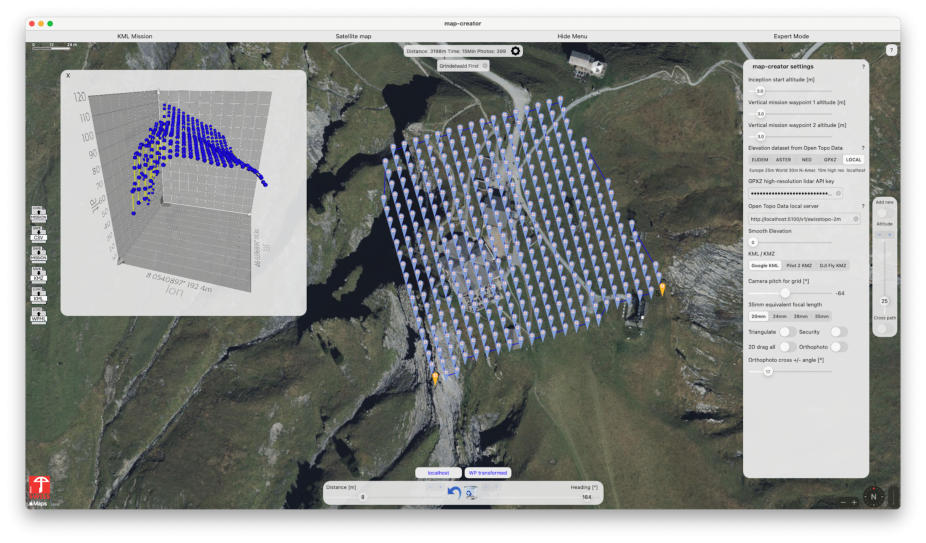
You can drag and add waypoints. Click on the waypoint in the 2D mission until it turns blue. You can now drag the waypoint. You can add a waypoint with add new behind a waypoint that you have just clicked on (it turns blue). You can drag the whole mission too.Add elevation
You can choose from various datasets for elevations: EU-DEM 25m, Aster 30m, NED 10m (North America), GPXZ for lidar preci- sion, and LOCAL for your own GeoTiff server from opentopodata.org. There is no limit to 100 waypoints. The map creator can import KMZ missions (WPML mission file) and convert the existing waypoints into very precise AGL.6 mission types
The Map Creator is based on 5 mission types. 1. 2D flat missions, 2D elevation missions 2. Orthophoto missions 3. 3D semi spheres 4. Inception 5. Panorama 6. 2D Vertical The Map Creator is compatible with hdrpano, DJI Pilot 2, DJI Fly and Litchi, Litchi Pilot.KMZ mission files for DJI Pilot SDK 5
The Map Creator converts 2D Missions, 2D Helix Missions and Vertical Missions into DJI Pilot 2, DJI Fly KMZ files. You can import them on the RC Pro with the SD card or with Google Drive.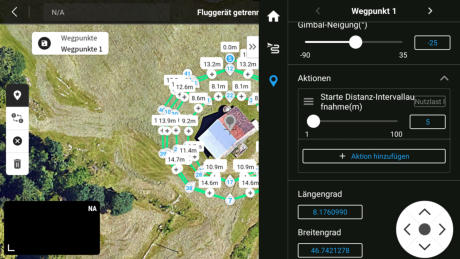

map-creator iOS and Mac OS
You can download the map-creator under this link for iOS and Mac OS.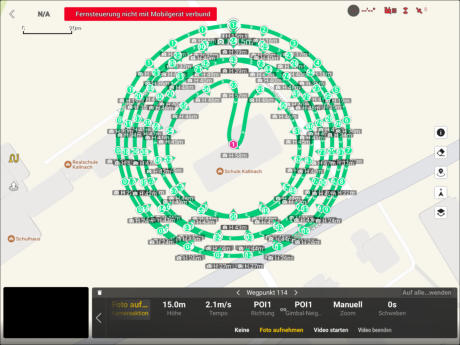
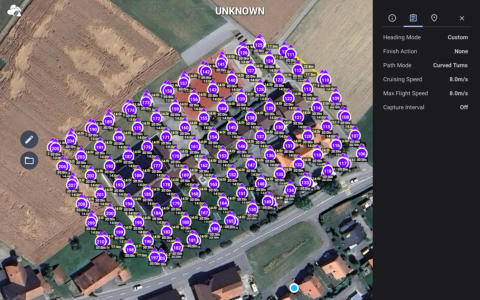
2D Mission
You can add 2 missions with a single or crossed track. The best results are achieved with an pitch angle of -70°. You will get the best results if you combine a 2D and a 3D mission. You can use the elevation to obtain the mission surface on a terrain. It is now also possible to obtain the helix mission on a terrain.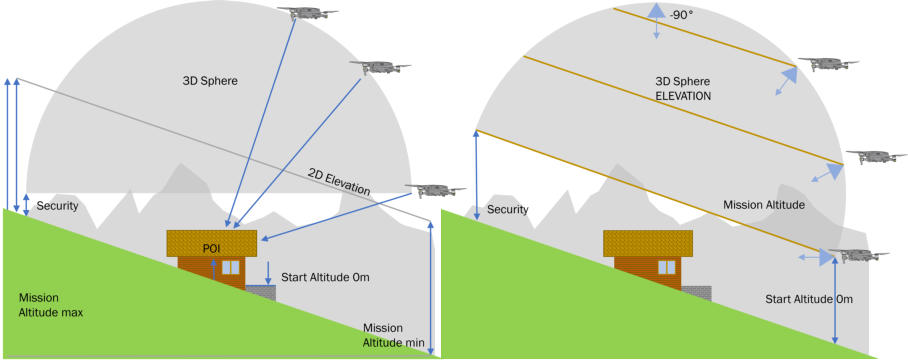
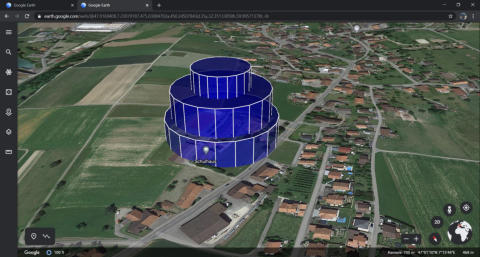
KML Export
You can export your mission into a KML file to check the flight path on google earth. Do not import this KML file into DJI Pilot. You should use the KMZ mission file instead.
KMZ mission files for DJI Fly
You can import the KMZ mission file into DJI Fly. Select DJI Fly export into the settings from the map-creator.CSV mission files for Litchi Pilot
You can import the CSV mission file into Litchi Pilot. Import first the mission into the mission hub from Litchi.
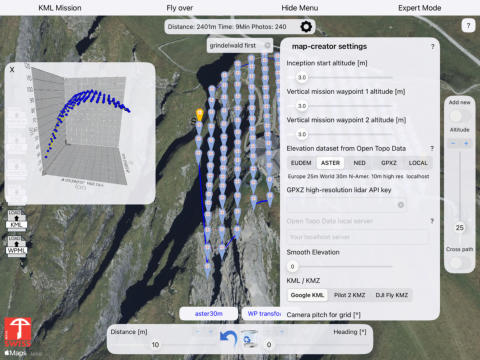
Elevation systems
There are three elevation models. The simple model places your mission polygon on a surface. This is the simplest method. You can triangulate the polygon. The individual triangles are divided into sub-missions. You can also divide your mission into many waypoints and query an elevation for each waypoint. This complex mission can also be smoothed.

Open Topo Data lokaler Server auf MacOS
You can run your own DEM server on macOS. Open Topo Data has a free git project for this purpose. All GDAL compatible GeoTiffs can be used. First, install Docker (apple-silicon Docker). Create a local project directory without iCloud. The datasets should not be in the cloud (GB of data). Do not use your docu- ment folder (iCloud /Users/<your name>/Documents/). /Users/<your name>/Project/ cd /Users/<your name>/Project/ When using multiple computers, there may be problems with the cloud directory in Docker. Therefore, it is better to create a project directory outside the cloud. git clone https://github.com/ajnisbet/opentopodata.git cd opentopodata Edit Makefile and change port. Port 5000:5000 is occupied by MacOS. run: docker run --rm -it --volume "$(shell pwd)/data:/app/data:ro" -p 5100:5000 opento- podata:$(VERSION) daemon: docker run --rm -itd --volume "$(shell pwd)/data:/app/data:ro" -p 5100:5000 opento- podata:$(VERSION) run-local: FLASK_APP=opentopodata/api.py FLASK_DEBUG=1 flask run --port 5100 Create config.yaml (copy of example-config.yaml) # 400 error will be thrown above this limit. max_locations_per_request: 400 access_control_allow_origin: "*" datasets: - name: swisstopo-2m path: data/swisstopo-2m/ filename_epsg: 2056 filename_tile_size: 1000 Now the build can be generated. make build-m1 make run

hdrpano, © Kilian Eisenegger 2026, info@hdrpano.ch, 4800 Zofingen Switzerland
map-creator
map-creator generates 3D DJI missions for photogrammetry and orthophotos. map-creator uses multiple GeoTiff sources for highly accurate elevation or AGL. It reads KML and KMZ missions and saves KMZ missions for DJI Fly and DJI Pilot (Litchi Pilot is also supported). The map-creator runs on MacOS and iOS. On MacOS, a local GeoTiff server from opentopodata.org can be used. I have developed a Windows version with the same algorithms. The Windows version is actually only in script mode.Edit waypoints
You can drag and add waypoints. Click on the waypoint in the 2D mission until it turns blue. You can now drag the waypoint. You can add a waypoint with add new behind a waypoint that you have just clicked on (it turns blue). You can drag the whole mission too.Add elevation
You can choose from various datasets for elevations: EU-DEM 25m, Aster 30m, NED 10m (North America), GPXZ for lidar pre- cision, and LOCAL for your own GeoTiff server from opento- podata.org. There is no limit to 100 waypoints. The map creator can import KMZ missions (WPML mission file) and con- vert the existing waypoints into very precise AGL.
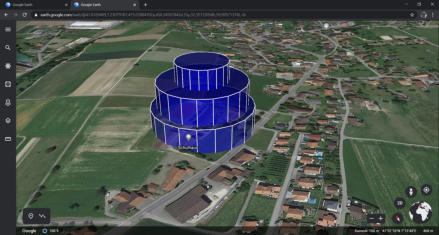
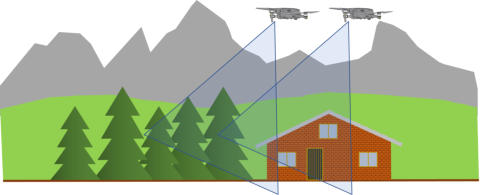
3D photogrammetry
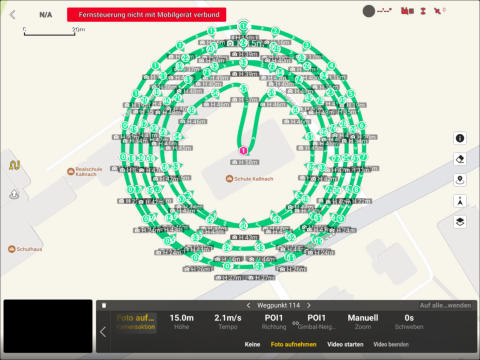
The Map Creator uses a hemispherical mission grid to optim- ize the 3D calculation. In a DJI mutable mission, this method uses only 5 waypoints for 3 POI flights for hdrpano 3D. For hdrpano 3D it is important to switch to Pilot 2 KMZ in the set- tings, to export the trigger distance.6 mission types
The Map Creator is based on 5 mission types. 1. 2D flat missions, 2D elevation missions 2. Orthophoto missions 3. 3D semi spheres 4. Inception 5. Panorama 6. 2D Vertical The Map Creator is compatible with hdrpano, DJI Pilot 2, DJI Fly and Litchi, Litchi Pilot.KMZ mission files for DJI Pilot SDK 5
The Map Creator converts 2D Missions, 2D Helix Missions and Vertical Missions into DJI Pilot 2, DJI Fly KMZ files. You can import them on the RC Pro with the SD card or with Google Drive.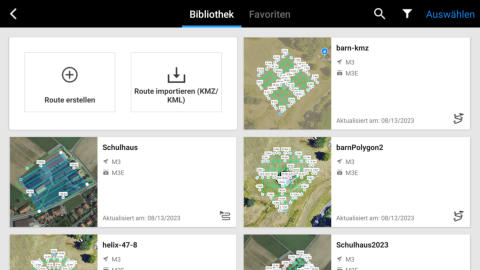

2D Mission
You can add 2 missions with a single or crossed track. The best results are achieved with an pitch angle of -70°. You will get the best results if you combine a 2D and a 3D mis- sion. You can use the elevation to obtain the mission surface on a terrain. It is now also possible to obtain the helix mission on a terrain.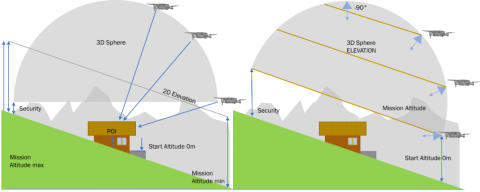
KML Export
You can export your mission into a KML file to check the flight path on google earth. Do not import this KML file into DJI Pilot. You should use the KMZ mission file instead.KMZ mission files for DJI Fly
You can import the KMZ mission file into DJI Fly. Select DJI Fly export into the settings from the map-creator.CSV mission files for Litchi Pilot
You can import the CSV mission file into Litchi Pilot. Import first the mission into the mission hub from Litchi.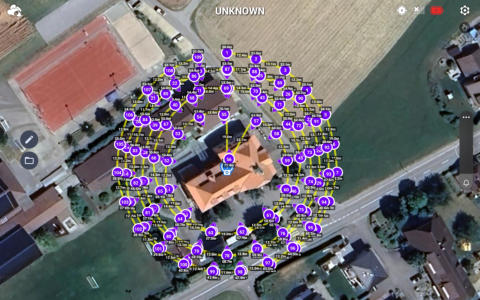
Elevation systems
There are three elevation models. The simple model places your mission polygon on a surface. This is the simplest method. You can triangulate the polygon. The individual tri- angles are divided into sub-missions. You can also divide your mission into many waypoints and query an elevation for each waypoint. This complex mission can also be smoothed.


Open Topo Data lokaler Server auf MacOS
You can run your own DEM server on macOS. Open Topo Data has a free git project for this purpose. All GDAL compatible GeoTiffs can be used. First, install Docker (apple-silicon Docker). Create a local project directory without iCloud. The datasets should not be in the cloud (GB of data). Do not use your docu- ment folder (iCloud /Users/<your name>/Documents/). /Users/<your name>/Project/ cd /Users/<your name>/Project/ When using multiple computers, there may be problems with the cloud directory in Docker. Therefore, it is better to create a project directory outside the cloud. git clone https://github.com/ajnisbet/opentopodata.git cd opentopodata Edit Makefile and change port. Port 5000:5000 is occupied by MacOS. run: docker run --rm -it --volume "$(shell pwd)/data:/app/data:ro" -p 5100:5000 opento- podata:$(VERSION) daemon: docker run --rm -itd --volume "$(shell pwd)/data:/app/data:ro" -p 5100:5000 opento- podata:$(VERSION) run-local: FLASK_APP=opentopodata/api.py FLASK_DEBUG=1 flask run --port 5100 Create config.yaml (copy of example-config.yaml) # 400 error will be thrown above this limit. max_locations_per_request: 400 access_control_allow_origin: "*" datasets: - name: swisstopo-2m path: data/swisstopo-2m/ filename_epsg: 2056 filename_tile_size: 1000 Now the build can be generated. make build-m1 make run